角速度ベクトルを理解する
ロボティクスなどの剛体の運動を考えるときに登場する角速度ベクトルについて改めての理解のためまとめました。角速度ベクトルの単位・向き・大きさの意味、速度との関係を定義から導いておこうと思います。
2次元での角速度(スカラー量)
まず2次元平面上での円運動について考えます。円周上の点の運動について、中心からの距離を 、角度を とします。
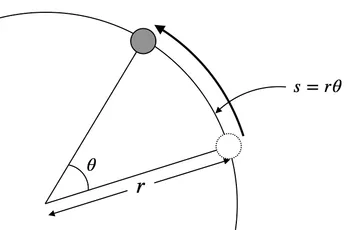
角速度は単位時間あたりの角度の変化として
で定義されます。 角度 はラジアンで測るので、角速度の単位は です。ラジアンは数学的には無次元ですが、回転量として解釈するため通常は と表記します。
速さとの関係
先程の図にもある通り、弧長 と角度 の関係は
です。両辺を時間微分すると
となり、左辺は単位時間あたりの移動距離(速さ )、右辺は先程の定義から角速度を含んでいるので、速さと角速度の関係式として
が導出されます。これは高校物理で習う等速円運動の基本式です。
速さとの関係(変位ベクトルで)
角速度と速さとの関係はすでに先ほどまでの議論で導出したのですが、今後の拡張に繋げるためにベクトルを用いた議論もしておきます。
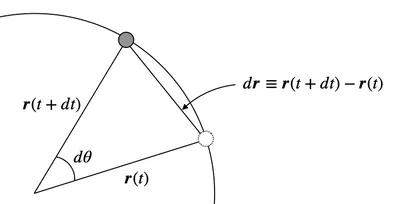
点 の位置ベクトルを とします。微小時間 での変位ベクトルは
です。このとき速度ベクトルは
のように、変位ベクトルの時間変化として計算することができます。 この速度ベクトルの定義を円運動に置き直すと、変位ベクトルは下図の部分です(変化を非常に大きく書いていることに留意してください)。
半径の大きさを 、円の接線ベクトルを とすると、
と書けるため速度ベクトルとしては
と計算することができます。
3次元での角速度
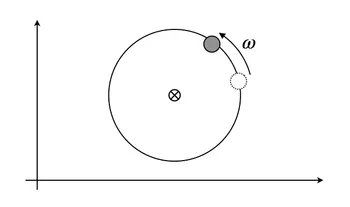
2次元平面の円運動では、回転面が常に同じ平面(紙面上)に固定されるため、回転軸の方向も自動的にその法線方向(紙面表裏の垂直方向)に決まるため、角速度の大きさと符号を考慮するだけで運動を決定することができていました。そのため回転の中心と角速度が分かれば、回転運動を定義することができていました。
ところが3次元では、円運動の回転面がどちらを向いているかという自由度が生じてくるため、単純に角速度をスカラーのまま扱うと、毎回どの平面で回っているかを別途指定しない限り回転運動を一意に復元することができなくなります。極端な例だと下図のように、角速度と回転中心が分かっても、回転面がどちらを向いているか分からないと運動を復元することができなくなってしまいます。
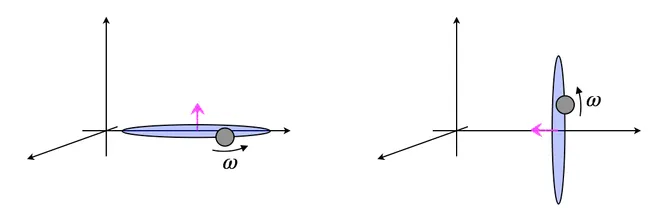
そのため3次元空間での回転運動を表現するために、回転軸方向の情報も持たせた角速度ベクトルを定義して、向き(回転面の法線)と速さを1つにまとめた角速度ベクトルを導入します。微小時間 での剛体の3次元回転運動において
- 単位ベクトル まわりの回転
- 瞬間的な回転角 での回転
とすることで、角速度ベクトルを
として定義します。 角速度ベクトル の大きさは
で、2次元平面でのスカラー角速度と同じく回転の速さを表します。 角速度ベクトル の向きは回転軸の向きであり、右ねじの法則で定めます。指を回転の向きに丸めたとき、親指が指す向きが の向きになるように定義します。
速度ベクトルとの関係
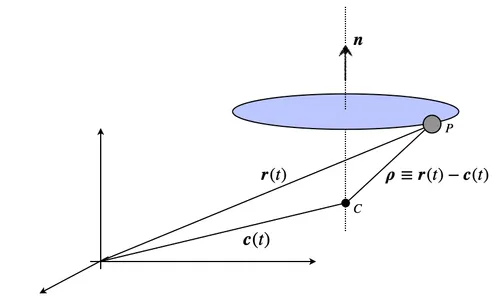
3次元空間上の座標と、底から離れた位置で点 が回転運動をしている場合を考えてみます。回転軸方向の単位ベクトル の周りを回転する点 の位置ベクトルを 、回転軸上の任意の点 の位置ベクトルを とすると、このとき
は、下図の様に点 から点 への相対位置ベクトルを表します。
2次元平面での円運動と同様に、変位ベクトルを用いることで速度ベクトルを導出していきたいので、まず円運動の接線方向のベクトルについて考えます。 円運動の接線方向は
- 回転軸に垂直
- 回転平面の半径方向に垂直
である必要があります。3次元空間であればこれらは
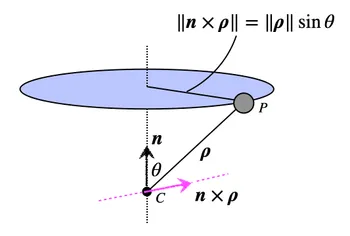
のように外積で簡単に作製することができ、これは にも にも垂直で接線方向になっています。また、この外積の大きさは
として下図のように回転半径の大きさに一致します。
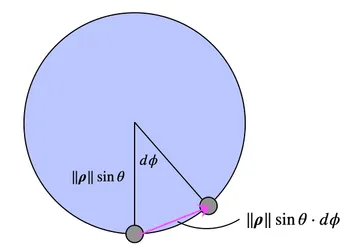
微小変位の大きさ自体はこれまでの議論同様、回転半径と回転角 を用いると、
として書けます。
そのため変位ベクトルとしては、外積 の大きさが式内に含まれていることに留意すると
と表わせることが分かります。 この変位ベクトルの関係式の両辺を時間微分すると
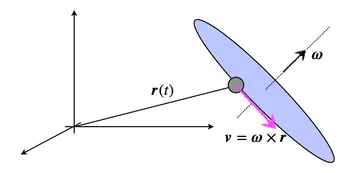
の関係式を導出することができました。この は回転軸からみた点 の速度ベクトルに等しく、角速度ベクトルと位置ベクトルの外積される量であることが分かります。
さらに、
の関係式を用いると、
となって、回転軸の速度と角速度による速度との足し合わせとなることが分かりました。
まとめ
3次元回転運動における角速度ベクトルについて各種性質を見てきました 角速度ベクトルは、ベクトルの大きさが角速度(回転の速さ)、ベクトルの向きが回転軸の方向を表すベクトルとして定義されます。
速度ベクトルとは次の関係式で結ばれます。
角速度ベクトルについては下図のように整理しておくのが良いと思いますが
留意点としては、
- 角速度ベクトルは回転軸を表すだけで回転中心自体を表しているわけではないこと
- 成分それ自体が角度の時間変化を意味しているわけではないこと
をあわせて抑えておくのが良いと思います。